Security Robots
Using XR to conduct studies in robotics
Maredith Byrd
Xin Ye is a University of Michigan Master’s Student at the School of Information. She approached The Duderstadt Center with her Master’s Thesis Defense Project to test the favorability of humanoid robots. Stephanie O’Malley at the Visualization Studio helped Xin to develop a simulation using three types of security robots with varying features to see if a more humanoid robot is viewed with more favorable experiences.

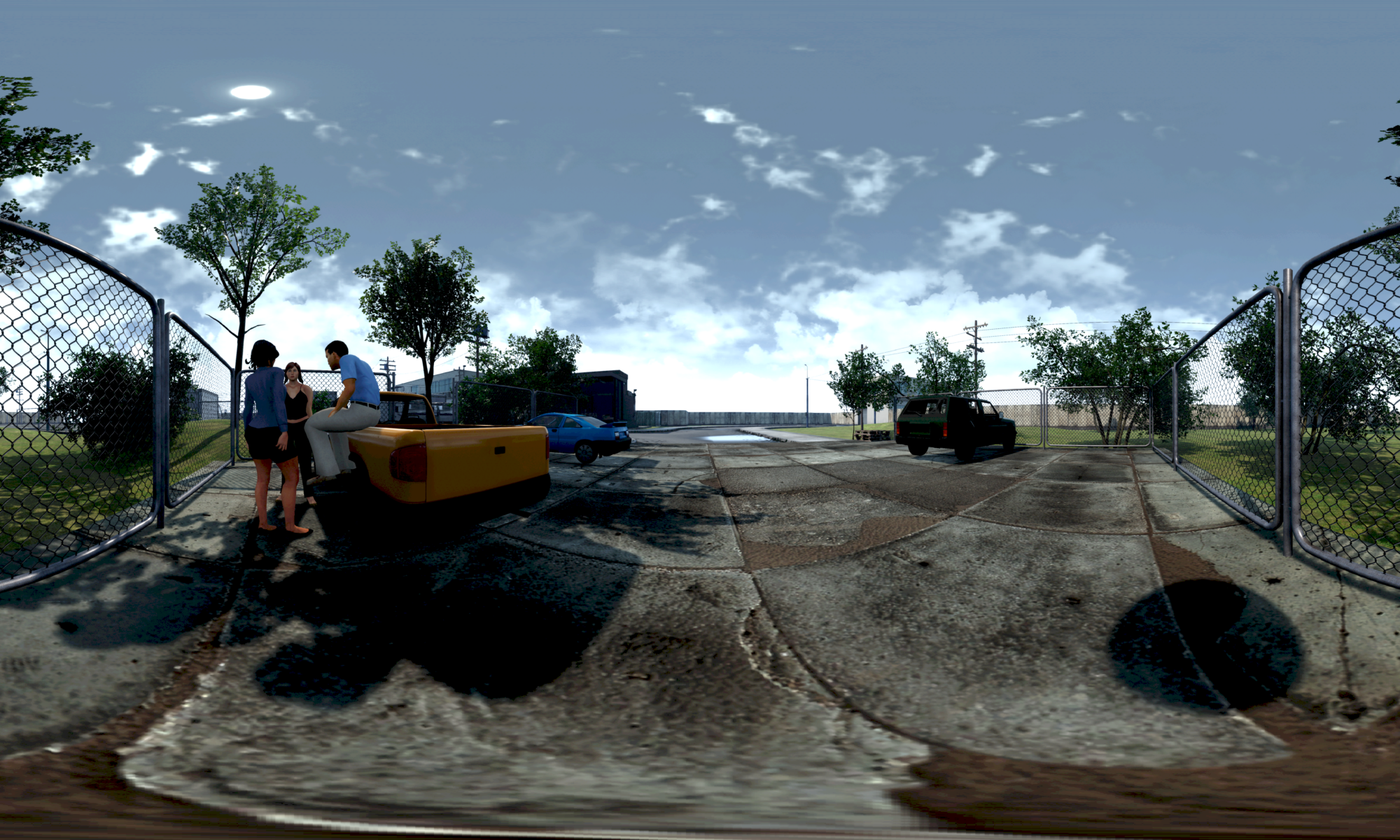
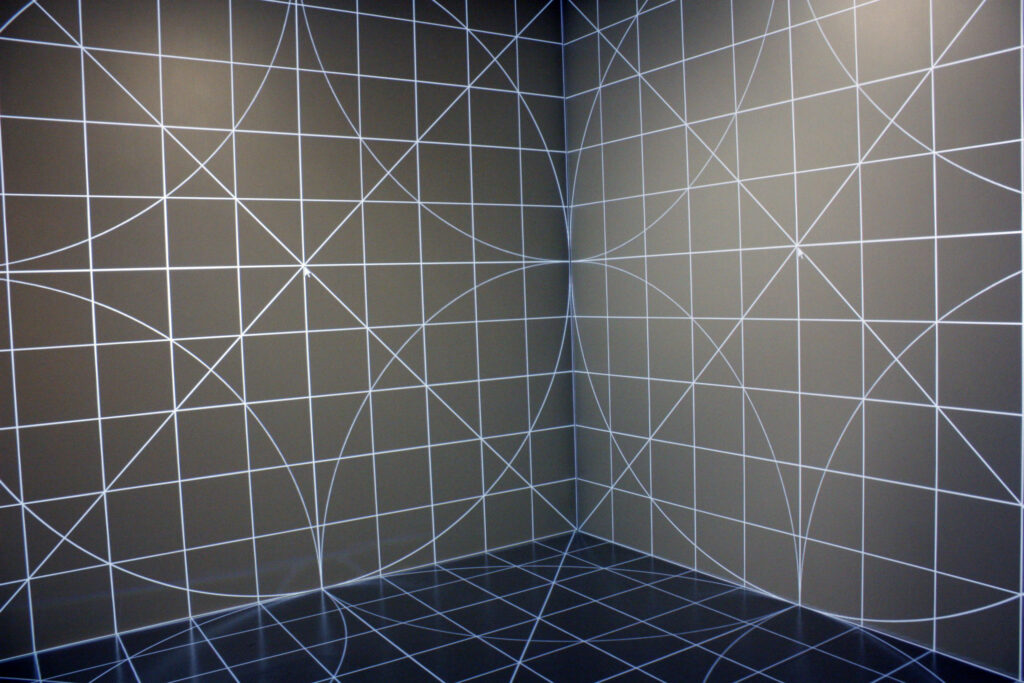
The simulation’s goal is to make participants feel like they were interacting with a real robot standing in front of them, so the MIDEN was the perfect tool to use for this experiment. The MIDEN (Michigan Immersive Digital Experience Nexus) is a 10 x 10 x 10 square box that relies on projections so the user can naturally walk in a virtual environment. An environment is constructed in Unreal Engine and projected into the MIDEN allowing the user to still see their physical body within the projected digital world, and the digital world is created to be highly detailed.

Users step into the MIDEN and by wearing 3D glasses are immersed in a digital environment that recreates common locations on a college campus: such as a university hallway/commons area OR an outdoor parking lot. After a short while, the participant gains the attention of the security robot, and it approaches them to question them.
Xin Ye then triggers the appropriate response so users think the robot is responding intelligently. The robots were all configured to have different triggerable answers to participants that Xin Ye could initiate behind the curtains of the MIDEN. This is a technique referred to in studies as “Wizard of Oz” because the participant thinks the robotic projection has an artificial intelligence just as a real robot in this situation would possess when in reality it is a human deciding the appropriate response.

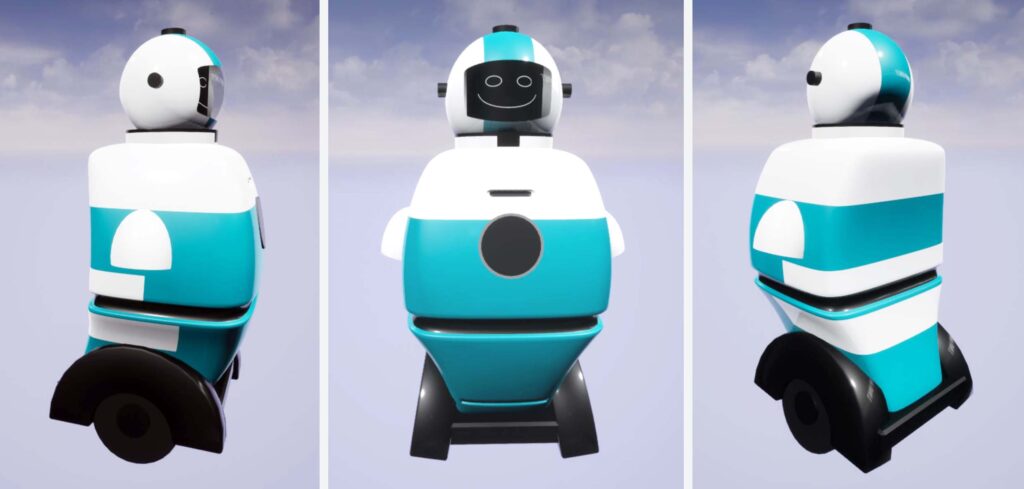
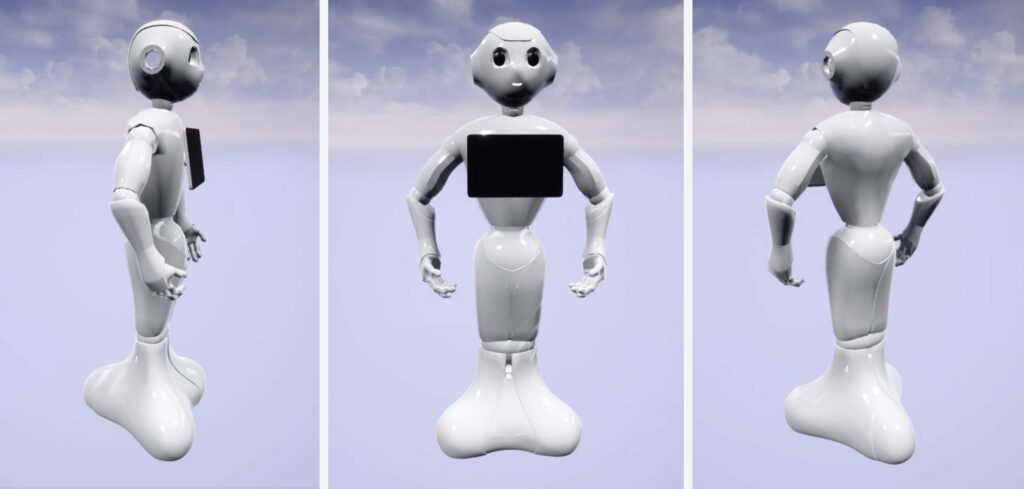
This project aimed to evaluate the human perception of different types of security robots – some more humanoid than others, to see if a more humanoid robot was viewed more favorably. Three different types of robots were used: Knightscope, Ramsee, and Pepper. Knightscope is a cone-shaped robot that lacks any humanoid features. Ramsee is a little more humanoid with simple facial features, while Pepper is the most humanoid with more complex features as well as arms and legs.
Participants interacted with 1 of 3 different robot types. The robot would approach the participant in the MIDEN, and question them – asking for them to present an MCard, put on a face mask, or if they’ve witnessed anything suspicious. To ensure that these robots all had a fair chance, each used the same “Microsoft David” automated male voice. Once the dialogue chain is complete, the robot thanks the participant and moves away. The participant then removes the 3D glasses and is taken to another location in the building for an exit interview. After the simulation, participants were interviewed about their interactions with the robots. If any participant realized that it was a human controlling the robot, they were disqualified from the study.


Xin Ye presented her findings in a paper titled, “Human Security Robot Interaction and Anthropomorphism: An Examination of Pepper, RAMSEE, and Knightscope Robots” at the 32nd IEEE International Conference on Robot & Human Interactive Communication in Busan, South Korea.